CNN Architectures
Case Studies
Also...
- NiN (Network in Network)
- DenseNet
- Wide ResNet
- FractalNet
- ResNeXT
- SqueezeNet
- Stochastic Depth
Review : LeNet-5
 |
CNN을 처음으로 도입하였으며, 우편 번호와 숫자를 확인하는데 사용하였다고 한다.
AlexNet (ILSVR'12 winner)
 |
AlexNet은 8개의 Layer로 구성되어 있다. (참고 : Convolution Layer (5개) 및 Fully Connected Layer (3개))
Output size $=\frac{\text { input_size }-\text { filter }+\left(2^{*} \text { padding }\right)}{\text { stride }}+1$
Input : 227 x 227 x 3 images 일때,
Q1 : First Layer(CONV1)에서 96 11 X 11 fillters applied at stride 4 를 통과된 output size 및 volume?
- 96 55 X 55 <Hint : (227 - 11)/4 + 1 = 55>
Q2 : What is the total number of parameters in this layer?
- Parameters : (11*11*3)*96 = 35K
Q3 : Second layer (POOL1) : 3 X 3 filters applied at stride 2 를 통과된 output size 및 volume?
- 96 27 X 27 <Hint : (55 - 3)/2 + 1 = 27>
Q4 : What is the total number of parameters in this layer?
- Parameters : 0 (CONV/FC는 parameter가 있지만, ReLU 및 Pool 등은 parameter가 없음)
 |
Detail
- ReLU 함수 : 처음으로 도입
- used Norm layers (not common layer)
- heavy data augmentaion
- dropout : 0.5
- batch size : 128
- SGD Momentum : 0.9
- Learning rate : 0.01 (reduced by 10 manually when val accuracy plateasus)
- L2 weight decay : 0.0005
- 7 CNN ensemble : 18.2 % -> 15.4 %
 |
위 그림에서 Feature Map이 앞서 output volume과 다른 이유는 이때 당시의 GPU의 Memory가 작기 때문에 96/2 = 48로 나누어서 모델을 학습시켰다고 합니다. (즉, 2개의 GPU를 사용함)
 |
위에서 CONV1, CONV2, CONV4, CONV5는 2개 GPU가 각각 독립적으로 Feature map 생성
 |
위에서 CONV3. FC6, FC7, FC8은 2개 GPU개를 cross하여 Feature map 생성
 |
2012년 ImageNet에서 우승을 하였으며, 최초로 CNN을 활용하여 우승, 이후 CNN이 급속도로 발전, transfer learning을 AlexNet으로도 많이 했다고 합니다.
ZFNet (AlexNet에서 parameter변화)
 |
 |
AlexNet 과 ZFNet의 차이점
- CONV1 : 첫번째 CONV를 11 X 11 stride 4 (AlexNet) 에서 7 X 7 stride 2 (ZFNet)으로 변경
- CONV3, 4, 5 : 채널을 384, 384, 256 (AlexNet)에서 512, 1024, 512 (ZFNet)으로 변경
결론적으로 기존 ImageNet top 5 error가 16.4% 에서 11.7% 로 감소되었다.
지금부터 Layer의 갯수가 더 많아지는 대표 model을 살펴볼 것이다.
 |
VGGNet
 |
Filter Size가 작아질수록 Network는 깊어짐
- AlexNet은 8개의 Layer를 사용했지만. VGG 16Net은 16개 ~ 19개 layers를 사용함
- 3 X 3 CONV stride 1, pad 1 (Only, 모든 layer 동일 적용)
- 2 X 2 MAX POOL stride 2 (Only, 모든 layer 동일 적용)
ILSVRC'13에서 ZFNet의 top error가 11.7%이던 것을 ILSVRC'14에서 VGG를 사용하여 7.3%까지 줄임
 |
Q1 : Whe use smaller filters ? (3 X 3 CONV)
- 3 X 3 CONV (stride 1) layer는 7 X 7 Layer와 같은 effective receptive field를 가짐
Q2 : What is the effective receptive field of three 3x3 conv (stride 1) layers?
- 작은 필터를 사용하면 parameter를 줄일 수가 있고, 여러번 겹쳐서 사용하면 더 큰 필터가 표현하는 영역(Receptive Field)을 표현할 수 있게 됩니다
- 깊어지지만, more non-linearities 성질을 가짐으로 분류하기 좋음
- 3 X (3 X 3 X C(input 채널의 수)) = 27 C vs 7 X 7 X C = 49 C
 |
 |
- Most memory is in early CONV
- Most Params are in late FC
VGG는 메모리 사용량이 많은 단점이 있음. image 1장당 필요한 memory가 약 96mb이므로 pc의 memory가 1GB인 경우 10장만 처리할 수 있다. 그리고, 전체 params 138M로 AlexNet보다 약 2배 늘었다.
 |
Tip : VGG에서 CONV가 많기 때문에 구조의 반복 편의를 위해 layer마다 이름을 위와 같이 지었다.
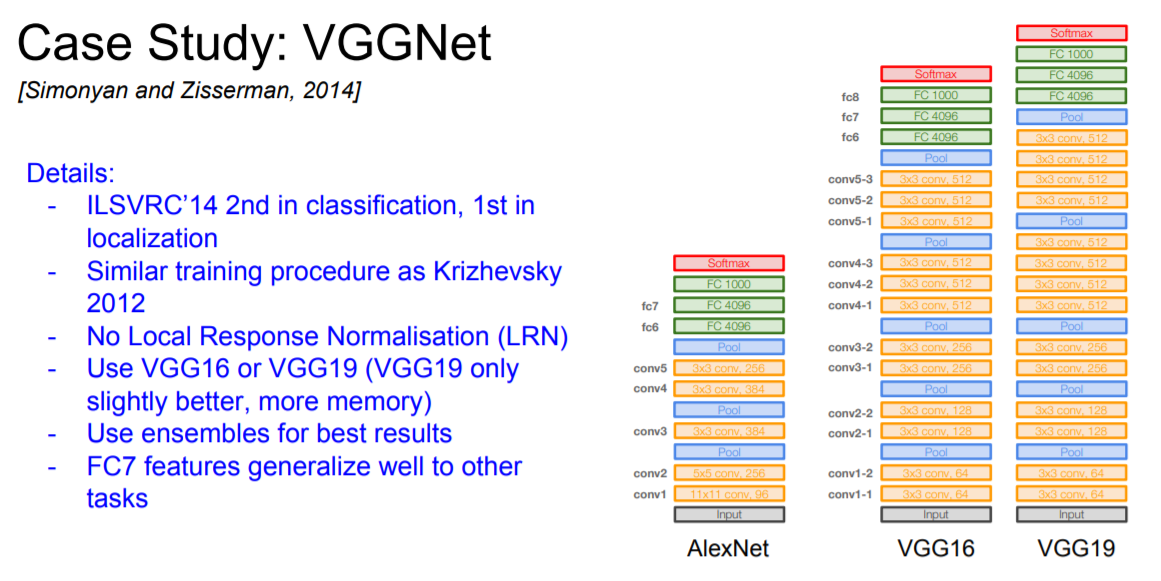 |
- ILSVRC’14 2nd in classification, 1st in localization
- localization : 어디에 물체가 있는지(Bounding Box) + Classification
- Similar training procedure as Krizhevsky 2012
- No Local Response Normalisation (LRN)
- Use VGG16 or VGG19 (VGG19 only slightly better, more memory)
- Use ensembles for best results
- FC7 features generalize well to other tasks
- Featrue Representation!
 |
- Layer의 depth : total number of layers
- input image의 depth : width x height x depth
GoogLeNet
 |
- 22개의 layers (much deeper networks with computational efficiency)
- "Inception" module이 도입되어 효율적임
- FC가 없다.
- parameter가 500만개만 존재함 (AlexNet보다 12배 적음)
- ILSVRC'14 분류 대회에서 6.7%로 우승을 차지함
 |
Inception module : 좋은 local network를 만들기 위해, network 사이에 local topology를 구현하여 쌓아올림
 |
여러개의 Filter 연산(1x1 CONV, 3x3 CONV, 5x5 CONV, 3x3 MAX POOL)을 평행하게 진행한 후 각각의 filter map을 concat하여 하나의 filter map을 만든다.
Q : What is the problem with this? [Hine : Computational complexity]
- 계산을 하는데 비용이 많이 든다.
 |
Q1 : What is the output size of the 1x1 conv, with 128 filters? (zero padding)
- 28 X 28 X 128 (1 x 1 CONV를 할 경우 W, H는 변하지 않으나, D(detpth)는 변한다)
 |
Q2 : What are the output sizes of all different filter operations?
- 28 X 28 X 128
- 28 X 28 X 192
- 28 X 28 X 96
- 28 X 28 X 256
 |
Q3 : What is output size after filter concatenation?
- 28 X 28 X (128 + 192 + 96 + 256) = 28 X 28 X 672
width 및 height가 28 X 28 로 같기 때문에 합칠 수 있음
CONV 연산 갯수 계산 결과
- [1 X 1 CONV, 128] : (28 X 28 X 128) X (1 X 1 X 256)
- [3 X 3 CONV, 192] : (28 X 28 X 192) X (3 X 3 X 256)
- [5 X 5 CONV, 96] : (28 X 28 X 96) X (5 X 5 X 256)
Total : 854M로 많은 연산량을 필요로 한다.
Pooling Layer 계산 결과
- module input의 depth를 유지하기 때문에 concat이후에 Filter map의 depth는 더 늘어날 수 밖에 없다.
따라서, depth가 커지고 expensive compute도 늘어나고 있다.
 |
위의 문제점을 해결하기 위해 "Bottleneck"을 도입하여 feature map의 depth를 줄임으로써 계산 복잡도도 줄이게 된다.
1x1 conv로 depth를 줄임
 |
 |
 |
CONV 연산 갯수 계산 결과
- [1 X 1 CONV, 64] : (28 X 28 X 64) X (1 X 1 X 256)
- [1 X 1 CONV, 64] : (28 X 28 X 64) X (1 X 1 X 256)
- [1 X 1 CONV, 128] : (28 X 28 X 128) X (1 X 1 X 256)
- [3 X 3 CONV, 192] : (28 X 28 X 192) X (3 X 3 X 64)
- [5 X 5 CONV, 96] : (28 X 28 X 96) X (5 X 5 X 64)
- [1 X 1 CONV, 64] : (28 X 28 X 64) X (1 X 1 X 256)
Total : 358M로 앞서 "bottleneck"을 도입하지 않은 모델의 연산량 854M보다 훨씬 적은 연산량을 필요로 한다.
참고 : 1 X 1 CONV를 수행하면 정보 손실이 없을까? 발생한다고 한다. 하지만, 동시에 redundancy가 있는 input features를 선형 결합을 하고 non-linear를 추가하면 네트워크가 더 깊어지는 효과가 있어서 도움이 된다고 한다.
 |
Inception modules를 계속 쌓아서 GoogLeNet이 완성된다.
 |
 |
 |
 |
FC Layer의 parameter가 매우 많기 때문에, 가능한면 제거!
FC 대신에 global average pooling(보라색 부분)을 사용한 결과로 feature vector를 추출할 수 있다. (overfitting 방지 가능) 이어서 FC Layer를 통해 Softmax를 진행
 |
보조 분류기 : 미니 네트워크로 불리며, 실제로 여기서도 loss를 구할 수 있다고 한다. (네트워크의 깊이가 깊기 때문에, gradient를 잃어버릴 수 있는 경우, 보조 분류기를 통해 추가적인 gradient를 얻어 학습을 도울 수 있다고 한다.)
 |
- 21개의 CONV
- 1개의 FC (softmax를 위한 마지막 부분)
ResNet
 |
- 152개의 layer를 사용함으로써 depth에 대한 엄청난 혁명을 가져옴
 |
- 152-layers
- ILSVRC'15 classification 우승 (3.57% top 5 error)
- classification / detetection
 |
Q : What’s strange about these training and test curves?
- layer가 깊어질수록 training / test 성능이 좋지 않다. 심지어 overfitting도 아니다.
일반적으로 layer가 깊어지면 overfitting이 나올 가능성이 높다고 하지만, 위 그래프의 train 및 test trend가 비슷하게 그려지므로 overfitting이 아니다.
 |
Hypothesis : the problem is an optimization problem, deeper models are harder to optimize
- Deep한 모델이 shallower한 모델보다 성능이 좋아야 함
Solution : A solution by construction is copying the learned layers from the shallower model and setting additional layers to identity mapping.
 |
입력 X를 F(x) 이후에 그대로 element 합으로 추가. 실제 학습할 때는 $F(x) = F(x) - x$인 잔차(residual)인 변화량만 학습하게 된다. 위의 방법을 사용하면 학습이 쉬워진다고 한다.
 |
- Residual block을 쌓음
- 기본적으로 모든 Residual block은 2개의 3 X 3 CONV layer를 구성되어 있음
 |
- 주기적으로 Filter를 2배 늘린다.
- block 마다 처음 CONV를 진행할 때 stride 2를 함으로써 downsample한다. (각 차원마다 /2)
 |
- 처음 Input이 통과하는 시작점에는 7 X 7, output channel = 64 및 stride = 2인 CONV layer를 적용
 |
- GoogleNet과 같이 마지막 Layer에는 일반적인 FC Layer를 사용하지 않으며, 최종 CONV이후에 global average pooling을 적용한 뒤, class분류를 위한 softamax 전에 FC layer를 사용한다.
 |
Version에 따라 18, 34, 50, 101, 152 layer가 있다. 아래는 논문에서 실험한 model 구조이다.
 |
 |
- GoogleNet과 마찬가지로 Layer의 depth가 깊어질수록 parameter 및 memory에 따른 계산 복잡도가 엄청 커지게 된다. layer가 50개가 넘어가면 보통 bottleneck을 사용한다고 한다.
- 효율성 증대를 위해 사용
 |
- 모든 CONV layer 이후에 Batch Normalization 적용
- Xavier/2 초기화 적용
- SGD + Momentum (0.9)
- Learning rate : 0.1 (검증셋의 error가 줄어들지 않으면 10으로 나눔)
- etc
identity 계산이 추가됨으로써 backpropagatation에 좋은 영향을 미친다고 한다. (기울기 손실 방지)
 |
 |
Comparing complexity
 |
- inception-v4 : ResNet + Inception
- VGG : Highest memory, most operations
- GoogLeNet : most efficient
- AlexNet : Smaller compute, still memory heavy, lower accuracy
- ResNet : Moderate efficieny depending on model, highest accuracy
Power consumption
 |
Other architectures to know...
Network in Network(NiN)
 |
Identity Mappings in Deep Residual Networks
 |
- depth를 더 늘려 성능 향상
Wide Residual Networks
 |
- 기존 Filter의 갯수를 F개로 설정하였지만, 여기서는 F x k개의 Filter를 적용시킴으로 layer의 depth가 아닌 channel을 넓힘
- 50-layer wide ResNet의 성능은 original ResNet 152-layer와 비슷함
- layer의 depth가 아닌 wide하게 filter를 추가함으로써 병렬연산이 가능하게 되어 컴퓨팅 효율을 향상 시킴
Aggregated Residual Transformations for Deep Neural Networks (ResNeXt)
 |
- 기존 Inception module에서 사용된 개념과 유사하게 residual block을 paralle 형태로 만듬
Deep Networks with Stochastic Depth
 |
- 기울기 소실을 방지하고 학습하는 동안에 network를 계산없이 pass시킴으로써 학습 시간을 단축시키기 위함
- 학습 기간에 residual block layers들을 랜덤하게 빼준다. (죽임)
- idenetity function으로 그냥 넘어감
- test 에는 모든 layer 사용함 (마치 dropout과 비슷함)
Densely Connected Convolutional Networks
 |
- Dense Block 도입
끝...
'CS231' 카테고리의 다른 글
| Lecture 11 : Detection and Segmentation (0) | 2020.05.17 |
|---|---|
| Lecture 10 : Recurrent Neural Networks (0) | 2020.05.09 |
| Lecture 8 : Deep Learning Software (0) | 2020.05.02 |
| Lecture 7 : Training Neural Networks II (2) | 2020.04.16 |
| Lecture 6 : Training Neural Networks I (2) | 2020.04.12 |



댓글